
Motivation
Spherical mechanisms have many fields of application. They are used for swivel heads of machine tools for 5 axis machining, for assemblies of telescopes, positioning of antennas or for metrology applications.
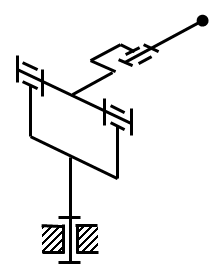
Absolute majority of spherical mechanisms is based on the Cardan hinge, which is a serial kinematical structure:
Advantages
Disadvantages
|
|
Because of more cons than pros another solution for spherical mechanisms has searched. All of these problems were circumvented by the adoption of simple parallel kinematical structures:
Advantages
Disadvantages
|
|

Eventhough the number of disadvantages is still high, simple parallel structures were used in many applications, but with limited workspace:
 |
 |
 |
| Study of a Hexapod based antenna - singular barrier has not been taken into account... | Succesfull swivel head for machine centers Sprint Z3 from DS Technologie (workspace +/- 30°) | Hexapod based telescope installed in Chile (tilting angles upto +/- 47°) |
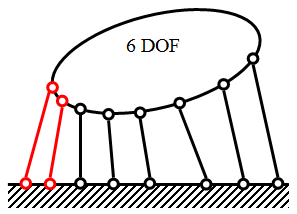
To avoid the problems of simple parallel kinematical structures, the solution is based on the use of redundant actuation (the number of actuated parallel struts is greater than the number of degrees of freedom):
Redundant actuation brings
|
|
The principle of redundant actuation comes from Kurtz & Hayward. They proposed a new type of spherical mechanism (3 DOF) with 4 actuators, so their mechanism is 1 x redundant. It is free of singularities, however the maximal to minimal dexterity value ratio is disadvantegous.
 |
 |
|
Redundant actuation - # of actuated parallel struts > DOF |
Redundantly actuated spherical mechanism by Kurtz & Hayward |