
Kinematic analysis
The concept of HexaSphere consists of Stewart platform (Hexapod) and a central spherical joint, that creates a link between the platform and the frame and leaves only 3 DOF to the platform. The platform can be positioned by 6 actuated struts, thus the mechanism is 3 times actuated.

The mechanism has been analyzed for dexterity, which characterizes the transfer of forces from actuators to the end effector. The ideal value is 1, the worst value corresponding to singular position is 0. The result within the whole workspace for tilting angles upto +/- 100° is on the following image:
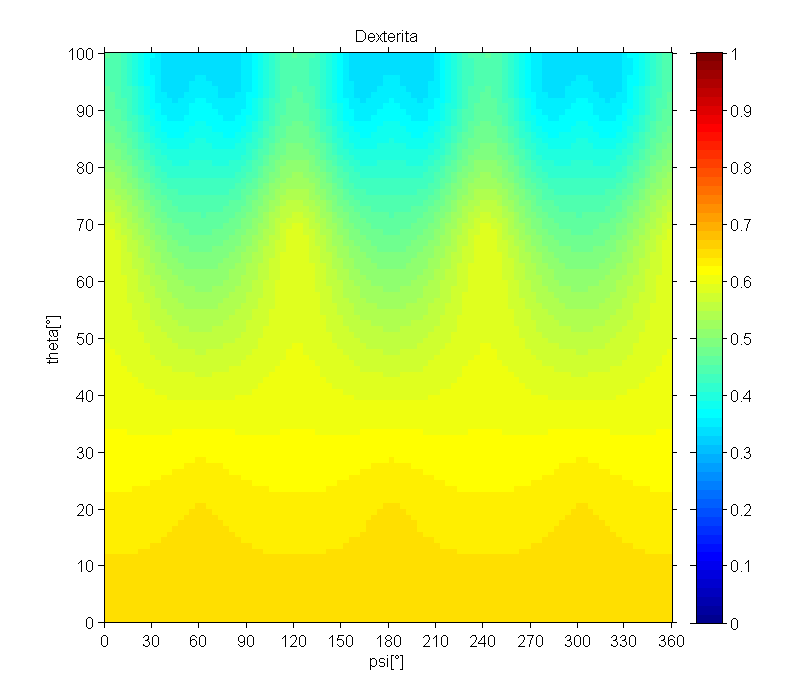
The dexterity ranges from 0.35 to 0.65, thus it changes only twice in the whole workspace and there are no singular positions! That means the actuation forces need to by only 2÷3 times higher than the forces on the end effector.